Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!

From demo to production, different product stages have different requirements for LiDAR’s mechanical design, hardware, software, validation, verification and reliability. For automotive LiDAR, it usually takes several years to move from a concept to a stable mass production product in order to support the complete commercial autonomous vehicles.
After five years’ investments in iterations of five major stages and dozens of small stages, RoboSense has finally announced at the CES2021 and demonstrated the SOP version of the automotive-grade MEMS solid-state LiDAR RS-LiDAR-M1 (referred to as “RoboSense M1”). The RoboSense M1 is expected to start large-scale mass production and delivery to OEMs in Q2 2021.

△ SOP version RoboSense M1
RoboSense M1 has been delivered to OEM partners in batches in December 2020, becoming the world’s first mass-production-ready solid-state automotive LiDAR.
Hardware
The small package size enables easier vehicle integration.
In order to provide maximum design freedom, RoboSense has been continuously working to reduce the size of LiDAR. After repeated validations and verifications, the SOP version of RoboSense M1 has finally achieved a smaller size and completed the final hardware freeze: comparing to the previous B2 version, depth is reduced by 12mm, thickness by 5mm, and overall volume is reduced by 19%. RoboSense M1’s final thickness is 45mm, depth 108mm, and width 110mm.
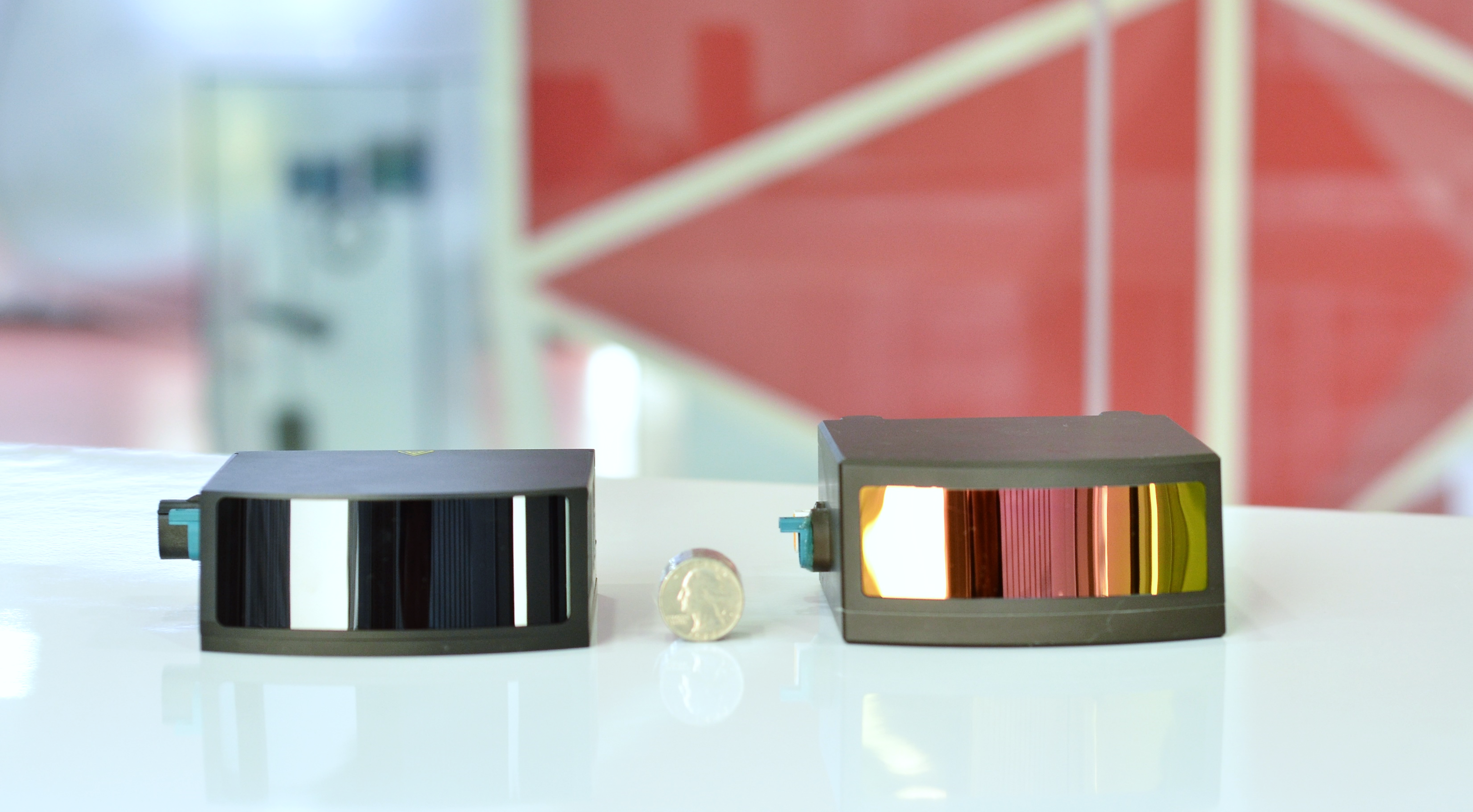
△ left is RoboSense M1 SOP version; right is the previous B2 version
Performance
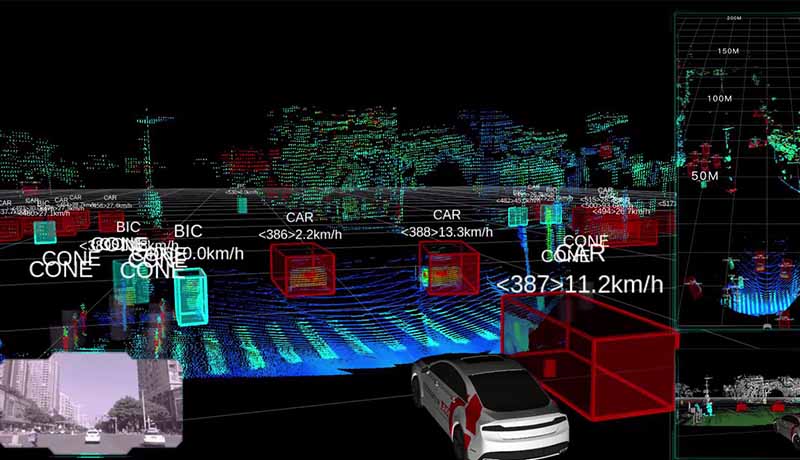
The ranging capability of RoboSense M1 has reached more than 150m for 10% reflectivity targets (up to 200 meters for vehicle targets ), it can accurately and stably detect a black vehicle even without license plate and lights at 150 meters away! The RoboSense M1 is also excellent in near-field detection. Even highly reflective objects at 0.3 meters in front can still be effectively detected by the RoboSense M1.
With powerful ranging capability combined with an average resolution of 0.2°x0.2°, RoboSense M1 can detect a car at a distance of 150 meters with 4 lines and 13 points, which is enough for perception algorithms. In the meantime, M1 supports dual echo function with maximum amount of points per second up to 1,500,000.
△SOP version of RoboSense M1 real-time point cloud
Ø Sunlight interference
Strong sunlight is one of the LiDAR’s ambient light interference sources. When the vehicle is driving towards the sun with the LiDAR facing the sunlight, obvious noise will appear in the LiDAR’s point cloud if processed inappropriately.
RoboSense adopts an innovative signal processing strategy and optical system design according to the installation position and system functions of the vehicle, so that RoboSense M1 can distinguish laser emission signals from ambient lights to reduce the strong sunlight interference.
△Noise-free point cloud collected from the SOP version of RoboSense M1 facing the sun
Ø Multiple LiDAR crosstalk
When multiple LiDARs are used together, the transmitted and received laser pulses from different LiDARs are possible mixed, resulting in point cloud noises. RoboSense M1 uses unique technologies to filter out laser pulses from other LiDARs to prevent multiple LiDAR crosstalk.
△The left screen shows the real-time LiDAR point cloud of the SOP version of RoboSense M1 with anti-interference function; right screen shows the real-time LiDAR point cloud without anti-interference function.
Function
The Automotive-Grade RoobSense M1 not only meets the performance requirements, but also fulfills the vehicle environmental adaptability requirements, such as exposure to ice, snow, mud, sand, dust, strong sunlight as well as interference from different LiDARs, Millimeter-wave radars, remote control modules, etc.
In order to cope with the above complex scenarios, M1 is equipped with complete supporting functions, including blockage detection, smart cleaning, heating, performance monitoring, power management, network management, etc.

△A cooperation case of RoboSense and Tire1 on LiDAR’s cleaning function
Meanwhile, RoboSense M1 provides complete point cloud post-processing solutions for OEM customers.
△SOP version of RoboSense M1 real-time point cloud video with AI perception algorithms
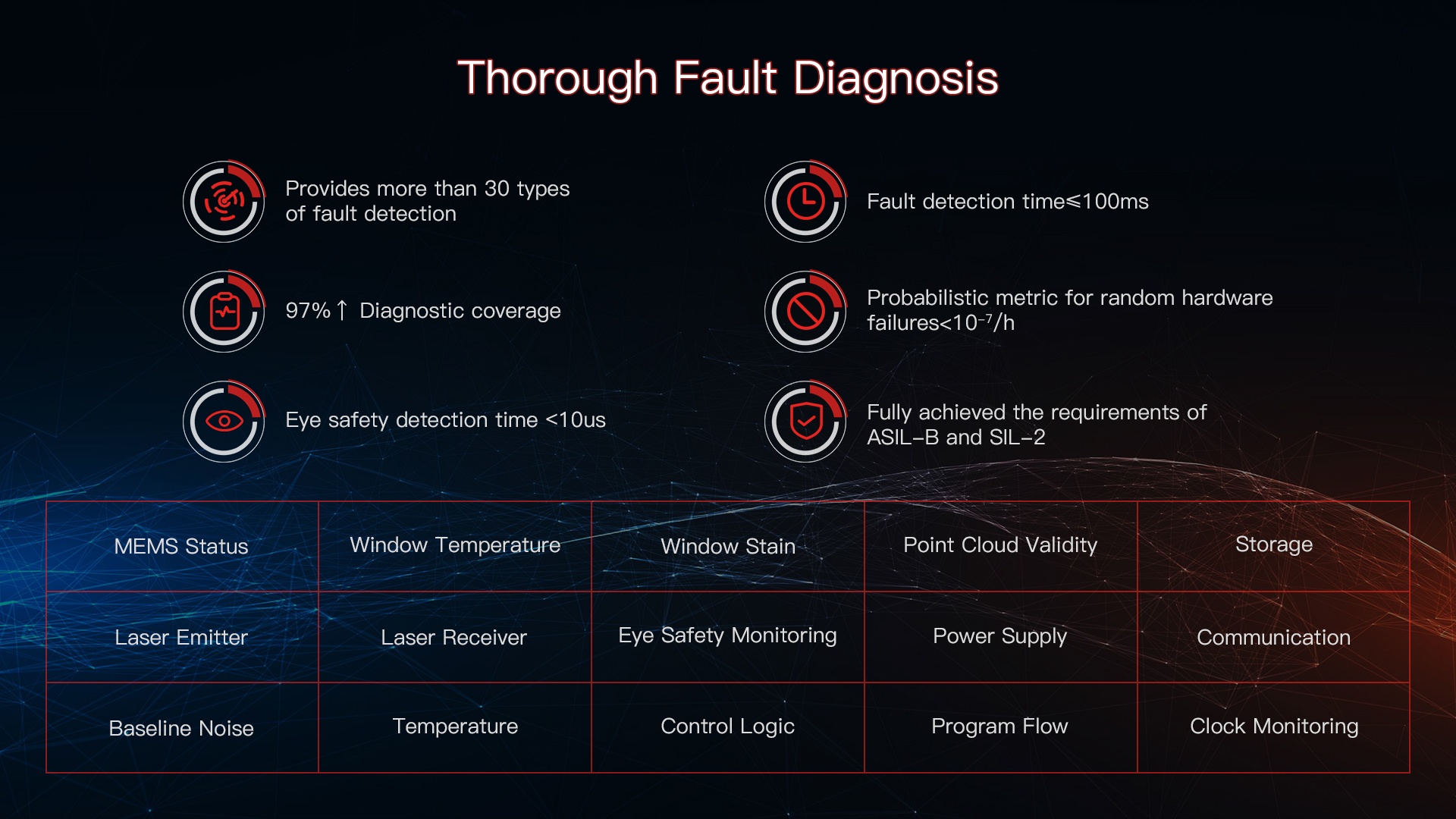
Functional safety design
RoboSense strictly abides by the ISO26262 safety standard, and has integrated the fail-safe concept and technology from aerospace and rail transportation systems, achieving all-round monitoring of various system modules such as laser emitter and receiver, MEMS control, point cloud processing, etc. Its safety mechanism has covered thousands of failure modes, with less than 10–7/h of the Probabilistic Metric for Random Hardware Failures, fully achieving the requirements of ASIL-B and SIL-2.
From the perspective of safety mechanism, if RoboSense M1 detects safety-related failures, it will automatically send a warning to the intelligent driving system in real-time to ensure that the system will not use wrong perception information. It also sets the first safety milestone in the field of global automotive-grade solid-state LiDAR.
Stability and reliability
Beginning from architecture design, LiDAR should be designed to meet the requirements of stability and reliability, including components ions. RoboSense strictly follows international standards such as ISO & AEC-Q and the requirements of top OEM customers, to carry out a series of verification tests on M1, including random mechanical vibration, mechanical shock, splash water, stone impact, high and low temperature storage and operation, solar radiation, EMC, chemical corrosion, salt spray and others.
RoboSense uses APQP as a project management tool, fully implements the IATF16949 quality management system, ISO26262 functional safety standards, ISO16750 automotive reliability specifications, and adopts VDA6.3 to assess quality management capabilities, continuously improving and ensuring the best quality of RoboSense M1 products.
△Mechanical Shock — Pothole
△Protection against dust and water — IPX9K
△Protection against dust and water — IP6KX
△Corrosion test with the flow of mixed gas
Performance, stability and mass-production capability are the three major factors for automotive LiDAR to advance the commercial use of autonomous driving.
As global OEMs respectively announced the plans for pre-installed LiDARs for autonomous vehicles, the time for mass production of automotive-grade high-performance LiDARs is approaching.
Current RoboSense M1 has fully met the top OEM’s performance requirements, and has frozen the package size, power consumption and point cloud quality. It has passed dozens of reliability tests, and has already been shipped to North American automakers and Robo-Truck companies in batches.
RoboSense will continue to provide smart LiDAR products with adaptability to various scenes for global partners. Through joint research and development, RoboSense obtains abundant scene data and applies them to technological improvement, continues to provide LiDAR that better meets the needs of different scenes, to steadily and rapidly promote large-scale commercial use of autonomous driving and advanced assisted driving passenger cars, commercial vehicles, logistics vehicles, robots, public smart transportation, and vehicle to infrastructure, and upgrades future transportation and people’s life.
Founded in 2014, RoboSense (Suteng Innovation Technology Co., Ltd.) is the leading provider of Smart LiDAR Sensor Systems incorporating LiDAR sensors, AI algorithms and IC chipsets, that transform conventional 3D LiDAR sensors to full data analysis and comprehension systems. The company’s mission is to possess outstanding hardware and artificial intelligence capabilities to provide smart solutions that enable robots (including vehicles) to have perception capability more superior to humans. http://robosense.ai/
 service@robosense.cn
service@robosense.cn 0755-86325830
0755-86325830 46057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai
46057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai


