Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!

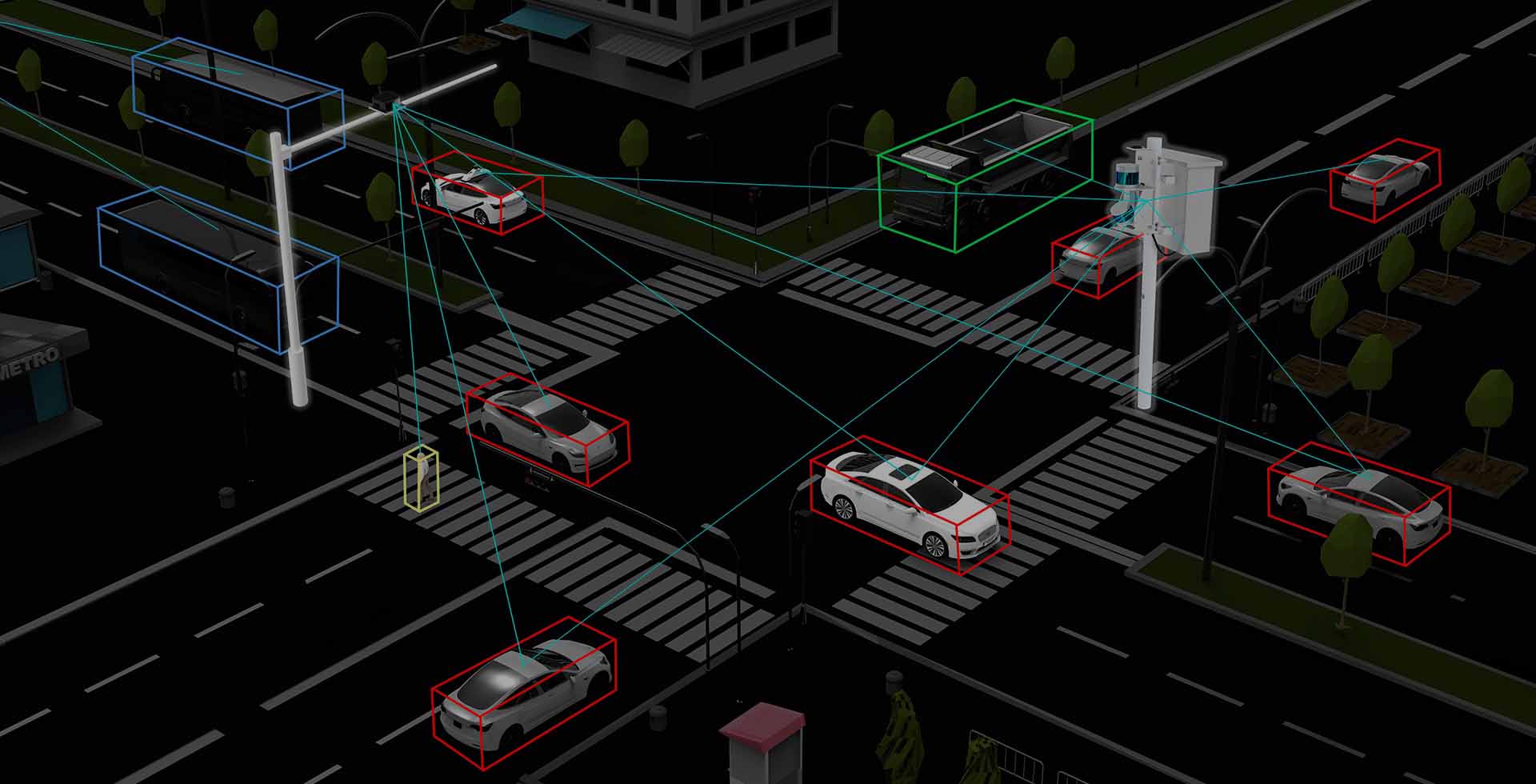
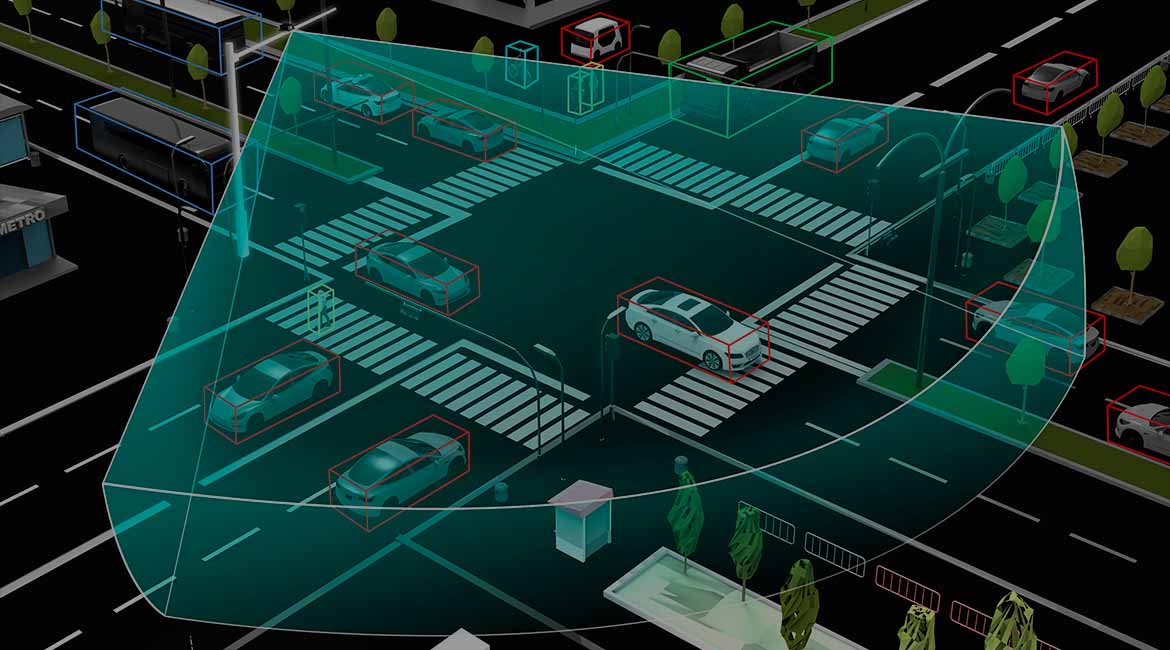
RoboSense V2X combines hard-core technologies in excellent LIDAR sensor hardware and Al point cloud Perception Software to provide the autonomous vehicles with eyes from the sky to break the limits of conventional environment perception systems of autonomous driving, facilitating the rapid development of new infrastructure for Intelligent transportation and ensuring the safety of Autonomous Driving.
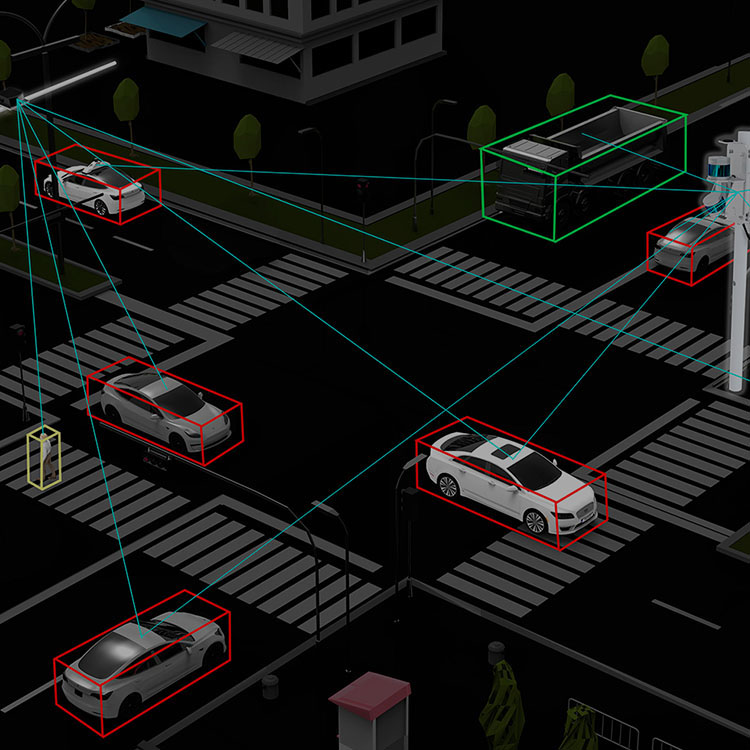
The V2X solution provides the target-level fusion function of the LiDAR sensing results based on a multi-base station, and realizes the precise spatial-temporal synchronization of the LiDAR point cloud of the multi-base station, so that all base stations are integrated into a spatial-temporal synchronized whole.
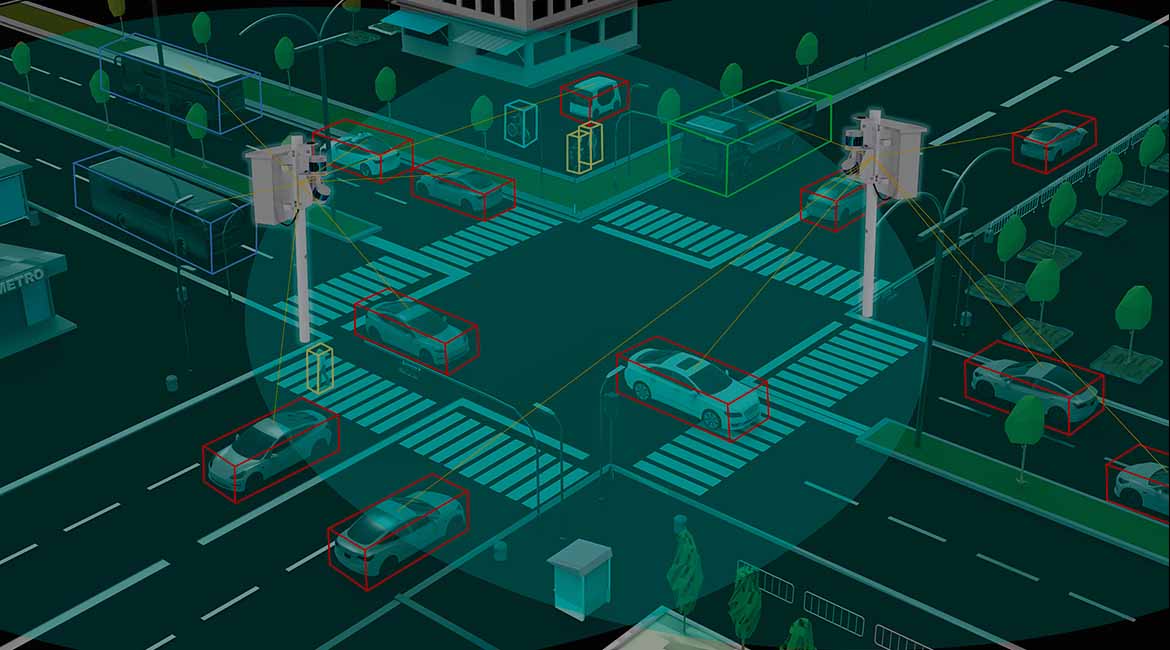
Through V2X, users can set dynamic electronic fences of any shape according to traffic scenarios and functional requirements, and define independent functions for each fence, such as specific target filtering, customized communications, etc.
RoboSense's accurate and reliable AI Perception Software allows more than ten traffic scene functions including traffic flow statistics, vehicle speed detection, retrograde detection, pedestrians red-light running, etc.
Based on the RoboSense fusion technology of LiDAR and camera, the V2X provides the bottom layer data fusion function of LiDAR and camera to obtain real-time synchronized true color point cloud data (x, y, z, r, g, b).











 Building 9, Block 2, Zhongguan Honghualing Industry Southern District, 1213 Liuxian Avenue, Taoyuan Street, Nanshan District, Shenzhen, China
Building 9, Block 2, Zhongguan Honghualing Industry Southern District, 1213 Liuxian Avenue, Taoyuan Street, Nanshan District, Shenzhen, China service@robosense.cn
service@robosense.cn 0755-8632583046057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai
0755-8632583046057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai


