RoboSense's EM4, the industry's only automotive-grade, high-channel-count digital front LiDAR in mass production, pairs with the E1, the only automotive-grade, fully solid-state digital blind-spot LiDAR also in mass production, to form the optimal LiDAR pairing. Together, they provide long-range precision and near-field blind-spot elimination, delivering a dual-perception safeguard that accelerates the large-scale commercial deployment of Robotaxis.

Since the beginning of this year, policy support, capital injection, and industry collaboration have collectively accelerated the commercialization of Robotaxi services. Leading Robotaxi companies have entered large-scale validation stages, scaling their fleets to the thousand-vehicle level. The capital market also offers positive outlooks: Frost & Sullivan predicts the global Robotaxi service market will reach $66.6 billion by 2030 and expand to $352.6 billion by 2035. Goldman Sachs expects that by 2030, more than 500,000 Robotaxis will be in operation across over 10 cities in China, with top-tier cities potentially achieving profitability as early as 2026. All signs indicate the tipping point for large-scale Robotaxi commercialization has arrived, ushering in a trillion-yuan market boom.
Scaling Robotaxi Deployment Demands Enhanced perception
As Robotaxi operations progress from limited pilot zones to large-scale commercial deployment, the driving environments become significantly more complex and diverse. During the pilot phase, operations were confined to small, controlled areas with relatively simple road and obstacle types. In contrast, large-scale commercial operation requires coverage across a wide range of scenarios—including urban arterial roads, highways, complex intersections, and even narrow residential alleys—with potential cross-city travel demands. As a result, the variety of obstacles the vehicle must detect increases substantially. This shift imposes much stricter requirements on perception performance and system reliability to ensure safety under more challenging conditions.
1.Upgraded Omnidirectional Perception for Dynamic Scenarios
Robotaxis must recognize a wide variety of road users—cars, two-wheeled vehicles, pedestrians — each with unpredictable and varied behavior. Precise long-range sensing and fine-grained short-range detection are both essential.
Take roadside passenger pickup as a typical scenario: to safely pull over, a Robotaxi must accurately predict the paths of cars and two-wheeled vehicles approaching from the rear-right side. In such cases, the vehicle moves slowly, and the lane-changing process takes time—requiring it to avoid potential conflicts with fast-approaching traffic behind. Traditional solutions like corner radars or rear-view cameras are insufficient due to their limited perception data. Even short-range LiDARs often fail to capture the precise speed and trajectory of nearby moving targets, hindering the Robotaxi’s ability to make proactive decisions and posing risks to operational safety.
Currently, RoboSense combines four EM4 LiDARs with four E1 blind-spot LiDARs to build a high-definition, no blind-spot perception system that solves Robotaxi’s sensing challenges. The EM4 sensors are installed on the front, rear, and sides of the vehicle, accurately detecting distant cars, two-wheeled vehicles, and other road users around the Robotaxi. Even during slow, time-consuming lane changes, they continuously provide precise positioning data, offering reliable input for the vehicle’s system to make proactive decisions and ensuring safe and comfortable driving in dynamic traffic. Meanwhile, the four E1 blind-spot LiDARs focus on the 360° short-range blind spots around the vehicle, eliminating perception blind spots with dense point cloud coverage. This dual-layer solution—“long-range precise detection plus short-range blind-spot elimination”—not only meets the continuous, full-range perception needs of roadside passenger pick-up scenarios but also demonstrates strong advantages in Robotaxi’s ability to generalize across diverse environments.
2. Breaking Through Small Object Detection Limits
In field tests with small objects, the previous generation of 128-beam LiDARs could detect low-profile obstacles such as 20×20 cm boxes only at distances of 50 to 60 meters — a range that clearly falls short of meeting the stringent perception requirements of Robotaxi applications.
To ensure operational efficiency and control maintenance costs, Robotaxis need to avoid even the smallest road hazards as much as possible—such as stones, small cardboard boxes, broken curbs, traffic cones, or wooden pallets—which may damage the undercarriage. This requires LiDARs to detect objects as small as 10–20 cm. However, the previous generation of 128-beam LiDARs could only detect such targets (e.g., a 13×17 cm box) at ranges of 30–40 meters. In extreme cases, this limited range may result in insufficient reaction time, increasing the risk of collisions and affecting both operational efficiency and passenger comfort.
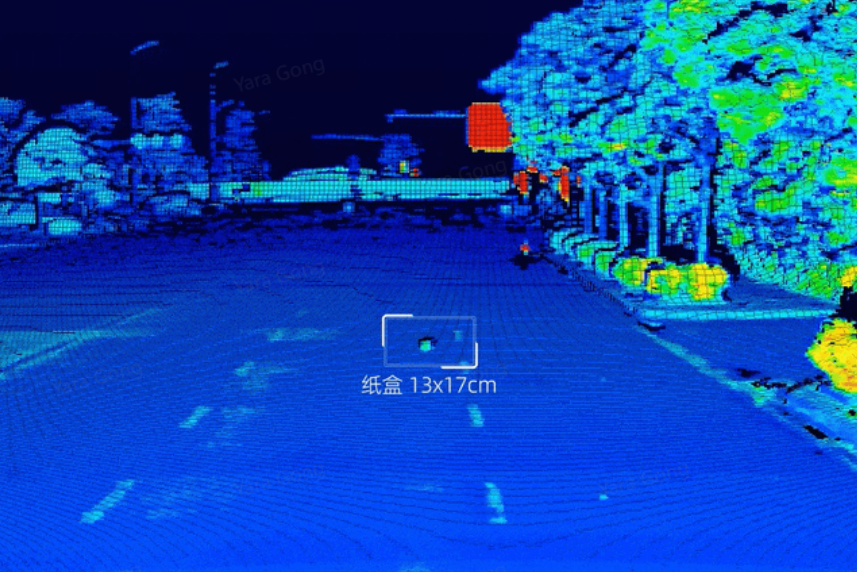
To overcome these challenges, RoboSense introduced the EM4 ultra-long-range digital LiDAR. Built on an advanced VCSEL+SPAD-SoC digital architecture, EM4 features high-sensitivity digital detection function, significantly improving signal integrity and point cloud quality. It delivers up to 0.050° × 0.025° angular resolution, enabling the detection of tires at 170 meters and objects such as stones, cardboard boxes, or small animals at 250 meters. In testing, the EM4 delivers clear and consistent echo signatures for small objects—such as a 13×17 cm cardboard box, which the previous generation of 128-beam LiDARs struggled to detect—even at distances of around 130 meters. This enables Robotaxis to effectively identify and avoid potential hazards in advance.
3. Enhancing Operational Capability in Complex Scenarios
Ensuring reliable operation in rain, fog, strong backlighting, and nighttime scenarios is essential for scaling Robotaxi. As fleet sizes grow and geographic coverage expands, rare or untested edge cases from pilot deployments become technical hurdles that LiDAR systems must overcome.
For example, on rainy nights, standing water on the road can absorb and reflect laser beams, significantly reducing the effective detection range of traditional LiDARs. In extreme conditions, the detection range of previous-generation 128-beam LiDARs may shrink to as little as 10 meters when scanning the road surface. When it comes to black vehicles covered in rainwater, these sensors may even fail to detect them entirely. Additionally, raindrops often introduce dense noise into the point cloud, creating “false obstacles” and leading to false detections.
To address these issues, the EM4 has been upgraded to maintain an effective ground detection range of over 60 meters even in heavy rain at night, while consistently and reliably detecting dark-colored vehicles. Powered by a digital detection system, EM4 also features advanced noise-reduction technology designed to handle rain, fog, snow, and dust. It intelligently analyzes the information carried by each digital echo signal, accurately filtering out environmental noise and restoring clear scene information. This significantly reduces false positives and provides a higher level of safety redundancy for autonomous driving.
△ Point cloud from EM4 in heavy rain conditions (10 Hz frame rate)
Additionally, water or dirt on the LiDAR lens can significantly degrade performance. Traditional LiDARs using single-point lasers with small spot sizes are highly sensitive to lens cleanliness. Contamination blocks laser energy and drastically reduces signal return and detection capability. In contrast, the EM4 adopts an innovative "large spot size for near-field, small spot size for far-field" beam design, which allows it to effectively penetrate rain, water stains, and grime on the lens surface. This ensures accurate object detection and provides more reliable safety assurance for Robotaxi operations.
These scenarios represent just the tip of the iceberg in the complex operational environments Robotaxis must navigate. Efficient and safe commercial deployment requires not only handling well-lit roads with stable traffic, but also frequently responding to unstable flows, shifting lighting, and unexpected events. This places urgent demands on high-performance, highly robust LiDAR to ensure operation under all conditions and continuously improve perception stability and reliability.
Mature Technology Enabling Scalable Robotaxi Operations
RoboSense’s high-performance digital LiDAR, exemplified by the EM4, has proven its technological maturity. In the second half of 2025, customized LiDAR products built on the EM platform entered mass production and are being deployed in multiple passenger vehicle models set for official market launch. With a high level of product readiness, they fully meet the stringent demands of large-scale Robotaxi deployments — once again setting the industry benchmark for high-channel-count, long-range digital LiDAR.
The mass-produced EM4, combined with the world’s only fully solid-state blind-spot LiDAR in large-scale vehicle production—the E1—delivers precise, omnidirectional perception capabilities for Robotaxis in 2025. This powerful combination ensures continuous support for Robotaxis as they expand into more cities. Thanks to RoboSense’s continuous innovation in core technologies, strong in-house chip development capabilities, and the EM platform’s highly customizable architecture, the company is able to respond swiftly to the evolving functional and scenario-based requirements of Robotaxi applications.
Superior perception is not only the guardian of driving safety, but also the cornerstone of reliable Robotaxi operations under all conditions and commercial success. The EM4 + E1 solution pairing meets the highest standards for safety and efficiency while providing performance headroom for future technological evolution and market changes—helping Robotaxi operators stand out in a competitive market and accelerating the autonomous mobility revolution.

 service@robosense.cn
service@robosense.cn 0755-86325830
0755-86325830 46057 Five Mile Rd., Plymouth, MI 48170
46057 Five Mile Rd., Plymouth, MI 48170





