Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!


P6是RoboSense速腾聚创首款车规级固态激光雷达L4感知融合方案,汇聚了领先的激光雷达硬件、软件和MEMS芯片三大核心技术,具有更强感知能力、更高可靠性,支持激光雷达“一站式”灵活部署,守护自动驾驶出行安全,赋能无人出行服务大规模商业化落地。
4颗
车规级固态激光雷达融合360° x 25°
视场角FoV200米
最大感知半径7类
动静态障碍物感知覆盖2类
道路标识感知覆盖52项
障碍物感知数据输出

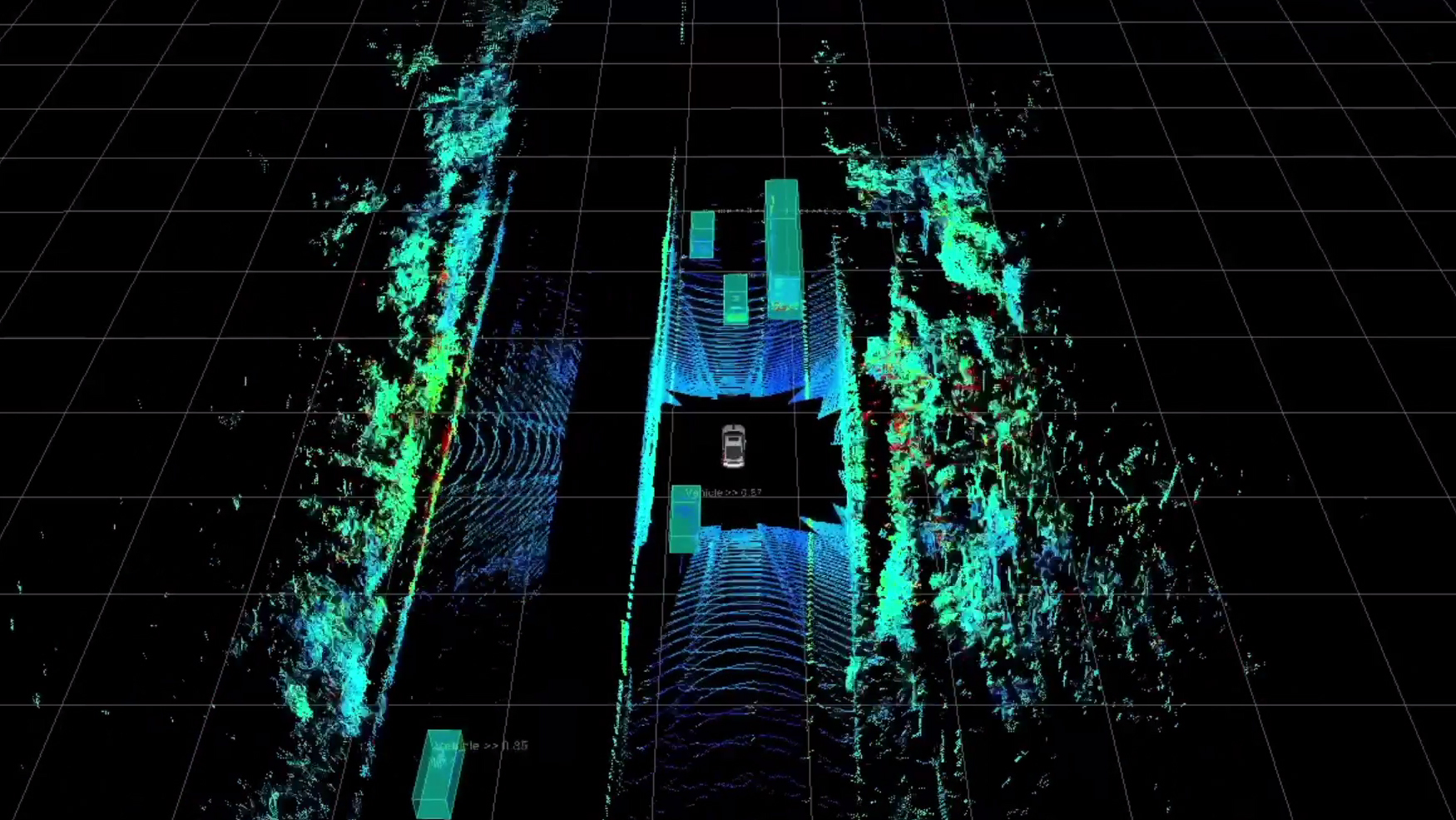
动静态障碍物检测
实时感知行人、骑行者、大型车、小型车、拖车、锥桶、石墩等动静态障碍物,并输出每个障碍物的ID、类型、位置、大小、速度、加速度、运动方向等在内的13类感知信息,共52项数据。
道路标识检测
清晰地识别车道线与路沿等多类道路标识,并向自动驾驶系统输出道路标识的ID、位置、曲率、区域、置信度等5项数据。
可行驶区域检测
基于动静态障碍物检测和道路标识检测结果,实时为自动驾驶系统输出可行驶区域。
人车混行场景
精准区分各类交通参与者,静候安全通行时机无保护左转场景
提前感知侧向来车,左转更果断、更安全汇入车流场景
精准感知侧后方车辆的位置、速度,迅速汇入车流车辆加塞场景
精准预判前车紧急加塞,避免碰撞


 深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋
深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋 service@robosense.cn
service@robosense.cn 0755-86325830
0755-86325830



反舞弊举报邮箱:
voice@robosense.cn